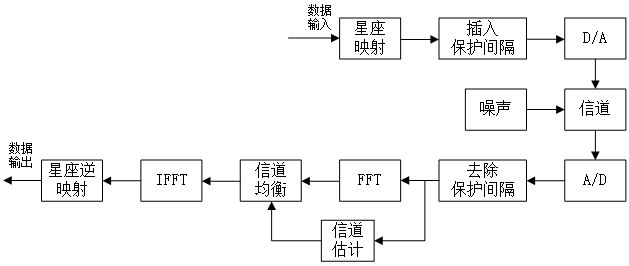
SC⁃FDE 基本原理
SC⁃FDE 的原理框图如下:
\(\boldsymbol{s}=[s(0), \cdots, s(N-1)]^{\mathrm{T}}\)为发送的长度为 \(N\) 的数据块。
\(\boldsymbol{r}=[r(0), \cdots, r(N-1)]^{\mathrm{T}}\)为接收数据。
接收数据通过 FFT 变换可以表示为:
\[R_k=S_k H_k+W_k\]上式中:
\(H_k\)表示信道频率响应;
\(S_k\)和\(R_k\)为发送信号和接受信号的频域表示;
\(W_k\)为噪声的频域表示;
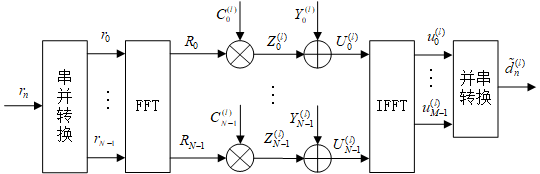
IBDFE 均衡算法原理
频域块迭代判决反馈均衡基本思想是通过多次迭代来增加检测数据的可靠性
其中前馈滤波器框图如下:
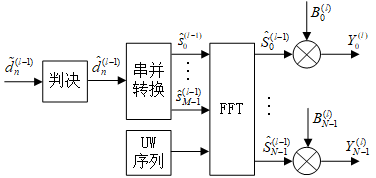
反馈滤波器框图如下:
其中:
\(C_k^{(l)}\) 为前馈滤波器系数;
\(B_k^{(l)}\) 为反馈滤波器系数;
\(l=1,2, \cdots, N_I\) 为迭代次数;
第 \(l\) 次迭代中,接收到的数据 \(R_k\),可得:
\[Z_k^{(l)}=C_k^{(l)} R_k, \quad k=0,1, \cdots, N-1\]进一步:
\(\hat{d}_n^{(l-1)}\) 为经过 \(l-1\) 次迭代后判决所得数据;
\(\hat{s}_n^{(l-1)}\) 为 \(\hat{d}_n^{(l-1)}\) 为插入UW序列后的时域表示;
\(\hat{S}_k^{(l-1)}\) 为 \(\hat{s}_k^{(l-1)}\) 经过FFT变换;
那么数据经过反馈滤波器可表示为:
\[Y_k^{(l)}=B_k^{(l)} \hat{S}_k^{(l-1)}, k=0,1, \cdots, N-1\]第 \(l\) 次迭代结果频域表示为:
\[\boldsymbol{U}^{(l)}=\boldsymbol{Z}^{(l)}+\boldsymbol{Y}^{(l)}\]那么如何求取前馈滤波器和反馈滤波器系数?
代价函数推导
首先进行代价函数推导
定义发送信号功率和 \(l\) 次迭代的频域信号功率为:
\[M_{S_k}=E\left[\left|S_k\right|^2\right], M_{\hat{S}_k^{(l)}}=E\left[\left|\hat{S}_k^{(l)}\right|^2\right]\]定义代价函数:
\[J_{\mathrm{HD}}^{(l)}=E\left[\left|\tilde{d}_n^{(l)}-d_n\right|^2\right]=\frac{1}{N} \sum_{i=0}^{N-1} E\left[\left|u_i^{(l)}-s_i\right|^2\right]\]其中:
\(\tilde{d}_n^{(l)}\) 表示第 \(l\) 次迭代后的时域估计符号序列;
\(d_n\) 表示真实发送符号序列;
\(u_i^{(l)}\) 表示第 \(l\) 次迭代后的时域估计符号;
\(s_i\) 表示真实发送符号;
该代价函数衡量的是“当前迭代所得的解调结果”与“真实符号”之间的误差期望值(均方差),即性能的好坏指标。
目标是通过最小化该代价函数,求解最佳前馈滤波器系数和反馈滤波器系数
根据帕塞瓦尔定理,上式变为:
\[J_{\mathrm{HD}}^{(l)}=\frac{1}{N^2} \sum_{k=0}^{N-1} E\left[\left|C_k^{(l)} R_k+B_k^{(l)} \hat{S}_k^{(l-1)}-S_k\right|^2\right]\]通过展开 \(R_k\) 带入:
\[R_k = S_k H_k+ W_k\]可以得到:
\[\begin{aligned} J_{\mathrm{HD}}^{(l)} & =\frac{1}{N^2} \sum_{k=0}^{N-1} E\left[\left|\left(C_k^{(l)} H_k-1\right) S_k+C_k^{(l)} W_k+B_k^{(l)} \hat{S}_k^{(l-1)}\right|^2\right] \end{aligned}\]不妨将上述误差项写成三式之和:
\[e_k=\left(C_k^{(l)} H_k-1\right) S_k+C_k^{(l)} W_k+B_k^{(l)} \hat{S}_k^{(l-1)}=A_k+B_k+C_k\]其中:
\(A_k = \left(C_k^{(l)} H_k-1\right) S_k\);
\(B_k = C_k^{(l)} W_k\);
\(C_k = B_k^{(l)} \hat{S}_k^{(l-1)}\);
则:
\[\left|e_k\right|^2=\left|A_k+B_k+C_k\right|^2\]展开三项之和的模平方公式:
\[|A+B+C|^2=|A|^2+|B|^2+|C|^2+2 \Re\left\{A^* B+A^* C+B^* C\right\}\]所以:
\[\begin{aligned} \left|e_k\right|^2= & \left|\left(C_k H_k-1\right) S_k\right|^2+\left|C_k W_k\right|^2+\left|B_k \hat{S}_k^{(l-1)}\right|^2 \\ & +2 \Re\left[\left(C_k H_k-1\right)^* C_k E\left[S_k^* W_k\right]\right] \\ & +2 \Re\left[\left(C_k H_k-1\right)^* B_k E\left[S_k^* \hat{S}_k^{(l-1)}\right]\right] \\ & +2 \Re\left[C_k^* B_k E\left[W_k^* \hat{S}_k^{(l-1)}\right]\right] \end{aligned}\]对期望进行简化,进行如下假设
\(E\left[W_k\right]=0\),噪声零均值;
\(S_k, W_k, \hat{S}_k^{(l-1)}\) 之间相互独立;
\(E\left[W_k \hat{S}_k^{(l-1)}\right]=0 、 E\left[S_k W_k^*\right]=0\);
定义功率项如下:
- 互相关项:\(\begin{aligned}r_{S_k, \hat{S}_k^{(l-1)}}=E\left[S_k \hat{S}_k^{(l-1) *}\right]\end{aligned}\);
代入并简化期望项后:
\[\begin{aligned} E\left[\left|e_k\right|^2\right]= & \left|C_k H_k-1\right|^2 M_{S_k}+\left|C_k\right|^2 M_W+\left|B_k^{(l) }\right|^2 M_{\hat{S}_k^{(l-1)}} \\ & +2 \Re\left[B_k^{(l) *}\left(C_k H_k-1\right) r_{S_k, \hat{S}_k^{(l-1)}}\right] \end{aligned}\]代入代价函数中得到:
\[\begin{gathered} J_{\mathrm{HD}}^{(l)}=\frac{1}{N^2} \sum_{k=0}^{N-1}\left\{\left|C_k^{(l)}\right|^2 M_W+\left|C_k^{(l)} H_k-1\right|^2 M_{S_k}+\left|B_k^{(l)}\right|^2 M_{\hat{S}_k^{(l-1)}}\right. \\ \left.+2 \Re\left[B_k^{(l) *}\left(C_k^{(l)} H_k-1\right) r_{S_k, \hat{S}_k^{(l-1)}}\right]\right\} \end{gathered}\]拉格朗日法推导滤波器最优系数
化简代价函数后,需要保证下面约束条件:
\[\sum_{k=0}^{N-1} B_k^{(l)}=0\]此时可保证反馈滤波器尽可能消除码间串扰,不影响期望信号如何理解
采用拉格朗日乘数法求滤波器系数,定义拉格朗日函数为:
\[\begin{aligned} f\left(\boldsymbol{C}^{(l)}, \boldsymbol{B}^{(l)}, \lambda^{(l)}\right)= & \frac{1}{N^2} \sum_{k=0}^{N-1}\left|C_k^{(l)}\right|^2 M_W+\left|C_k^{(l)} H_k-1\right|^2 M_{S_k}+\left|B_k^{(l)}\right|^2 M_{\hat{S}_k^{(l-1)}} \\ & +2 \Re\left[B_k^{(l)^*}\left(C_k^{(l)} H_k-1\right) r_{S_k, \hat{S}_k^{(l-1)}}\right]+\lambda^{(l)} \sum_{k=0}^{N-1} B_k^{(l)} \end{aligned}\]其中,\(\lambda^{(l)}\) 为拉格朗日乘数。此处定义:
\(r_{S_k, \hat{S}_k^{(l-1)}}\) 为相关因子;
\(M_{S_k}\) 为发射信号功率;
\(M_{\hat{S}_k^{(l-1)}}\) 为第 \(l-1\)次信号迭代功率
拉格朗日函数分别对 \(C^{(l)}, B^{(l)}, \lambda^{(l)}\) 求导:
\[\frac{\partial f\left(\boldsymbol{C}^{(l)}, \boldsymbol{B}^{(l)}, \lambda^{(l)}\right)}{\partial C_k^{(l)}}=2 C_k^{(l)} M_W+2\left[C_k^{(l)} H_k-1\right] H_k^* M_{S_k}+2 B_k^{(l)} H_k^* r^{*}_{S_k, \hat{S}_k^{(l-1)}}=0\] \[\frac{\partial f\left(\boldsymbol{C}^{(l)}, \boldsymbol{B}^{(l)}, \lambda^{(l)}\right)}{\partial B_k^{(l)}}=2 B_k^{(l)} M_{\hat{S}_k^{(l-1)}}+\lambda^{(l)}+2\left(C_k^{(l)} H_k-1\right) r_{S_k, \hat{S}_k^{(l-1)}}=0\] \[\frac{\partial f\left(\boldsymbol{C}^{(l)}, \boldsymbol{B}^{(l)}, \lambda^{(l)}\right)}{\partial \lambda^{(l)}}=\sum_{k=0}^{N-1} B_k^{(l)}=0\]其中,\(k=0,1, \ldots, N-1\)。
解方程可得:
\[C_k^{(l)}=\frac{H_k^*}{M_W+M_{S_k}\left(1-\frac{\left|r_{S_k, \hat{S}_k^{(l-1)}}\right|^2}{M_{\hat{S}_k^{(l-1)}} M_{S_k}}\right)\left|H_k\right|^2}, k=0,1, . ., N-1\] \[B_k^{(l)}=-\frac{r_{S_k, \hat{S}_k^{(l-1)}}}{M_{\hat{S}_k^{(l-1)}}}\left[H_k C_k^{(l)}-\gamma^{(l)}\right]\]其中:
\[\gamma^{(l)}=\sum_{k=0}^{N-1} H_k C_k^{(l)}\]判决反馈均衡每次迭代要计算两个滤波器系数,复杂度比较高。
文档信息
- 本文作者:Ziyue Qi
- 本文链接:https://www.qiziyue.cn/2025/07/07/%E5%88%A4%E5%86%B3%E5%8F%8D%E9%A6%88%E5%9D%87%E8%A1%A1/
- 版权声明:自由转载-非商用-非衍生-保持署名(创意共享3.0许可证)